

SCENE破解版是一款用于地面和手持式扫描仪的FARO三维数字化存档软件。您可以用 SCENE 软件通过创建点云数据来扫描三维的复杂结构,能实现最佳性能。作为高效的扫描数据处理和配准软件。软件带来了丰富的功能和工具,非常适合所有的Focus和第三方激光扫描仪收。支持通过使用实时现场配准、自动对象识别、扫描图像配准和定位功能,从而有效的对你的扫描数据进行处理和管理,软件通过整合利用无靶标和基于靶标的自动扫描定位功能生成的图像,快速而简单地生成全色彩的高质量数据。当你的扫描数据准备完成就可以通过执行简单的测量、创建出色的三维可视化效果、或者导出到各种点云和CAD格式,立即开始评估和处理。此外,SCENE还具有令人印象深刻的虚拟现实视图,使用户能够在VR环境中体验和评估捕获的数据。利用SCENE云端共享云可随时随地实现全球共享和协作,轻松且安全地共享扫描项目数据。升级版本提供新的易用功能,帮助您更快更简单地完成工作,以及漏洞修复。您可以提高工作效率和更轻松完成工作。本次带来最新破解版下载,含破解教程!
功能特色
1、升级改进的 RCP 导出
客户将体验速度更快、格式更通用的扫描数据导出到 Autodesk RCP/RCS 点云的服务。用户可以选择将其导出为项目、群集、单次扫描或扫描部分(选择和剪切框)。
2、移动对象过滤
自动删除在扫描场景中多余的移动对象,例如人和车辆。对于两个或更多扫描配准,新增的移动对象过滤器使用户可以更快地移除出现在相邻两站重叠区域中的差异对象。
3、以 .obj 格式导出和导入带纹理网格的三维模型
现在 .obj 导出增加了包含纹理网格的功能,其中点云的一部分可以从 SCENE 导出并导入 FARO Zone 3D(或其他应用程序),数据能以彩色显示并可以作为三维模型进行操作。现在,这些模型也能以 .obj 格式导入 SCENE。
4、网格控制
网格控制由平移和旋转手柄构成,允许手动放置网格,使操作更容易。
5、重新扫描远距离靶标
SCENE 支持新的扫描仪功能,能够重新扫描需要以更高分辨率扫描的远距离区域,以执行精确的靶标识别或捕获具有更高细节精度的更小区域。
6、Laser-HDR™ * 图像创建
SCENE 2019 中新的激光高动态范围(Laser-HDR™)功能通过巧妙的图像创建选项扩展了传统的扫描仪 HDR 功能,允许现有的 Focus 客户在极短的时间内实现类似的 HDR 结果。
7、导出高分辨率全景图像
SCENE 现在可以从低分辨率扫描中输出高分辨率全景图像。除节省时间外,用户不再需要在现场有额外的设备,例如单独的数码相机。
8、令人印象深刻的虚拟现实查看器
虚拟现实功能允许详细查看项目点云。用户可以选择使用 Oculus Rift 或 HTC Vive 眼镜,在办公室体验和探索身临其境般的现场细节。
9、灵活的数据配准
共享标记(编码标志)支持统一的 FARO Focus 和 Freestyle 数据处理和配准。
10、实时现场配准
SCENE增加了实时现场配准功能,能够实时地处理、配准并将三维数据无线传输至现场的移动设备或电脑*。
11、扫描仪控制任务
通过 SCENE 用户界面以无线方式直接连接至移动设备,用户现在可以远程控制 FARO FocusS 或 FocusM 激光扫描仪。
12、概览图
允许为总览图的视图设置背景颜色、扫描点颜色和突出显示颜色。总览图现在可以在 SCENE 中用作布局图,因此也可以作为分层图导出到 WebShare。
13、现场补偿
在现场或在办公室验证并调整扫描仪的补偿。对于所有新推出的FocusS Laser Scanner,SCENE 和 SCENE LT 均支持该功能。
14、高级过滤
多种高级过滤选项(例如“边缘伪影和项目点云过滤器”)改进了每个数据集的清洁度和色彩平衡。
15、三维网格化
SCENE 三维网格引擎可从三维选择器或裁剪框中创建扫描对象表面的细节丰富的水密网格。新增加的平滑选项可降低测量噪点和创建纹理平滑的网格。支持的网格格式包括:.stl、.obj、.ply 和 .wrl (VRML)。
16、功能强大的三维立体表面绘制功能
先进的立体表面绘制引擎能够以无与伦比的速度和质量显示数量巨大的扫描点。
17、HDR 映射
即便在极差的光照条件下,全自动 HDR 映射功能也能将逼真的图像细节和色貌保存在利用 Focus Laser Scanner 捕捉的扫描数据中。**
18、创建正射图像
每次校准画面时,用户都可以利用正射影像功能来创建正射图像。另外,用户还可以通过常见图像格式导出 X 射线模式的二维图像和二维/三维 .dxf 文件。
19、直观的用户界面
SCENE 采用直观的用户界面,为完成复杂的任务提供指导和支持。
20、更佳的 WebShare Cloud 集成
利用所有适用的过滤功能,将扫描数据、剖面图和完整的项目点云直接上传至 WebShare Cloud,创建质量极佳的三维可视化数据。
21、功能扩展插件
独特的插件界面能够让用户通过安装其他应用软件来扩展SCENE的功能。FARO 3D应用中心提供了所有的应用软件。
*仅适用于FocusS 激光扫描仪。
**仅适用于具有 HDR 功能的扫描仪。
安装破解教程
1、在本站下载并解压,得到E1794_SCENE_7.1.1.81_x64_Setup.exe安装程序和crack破解文件夹
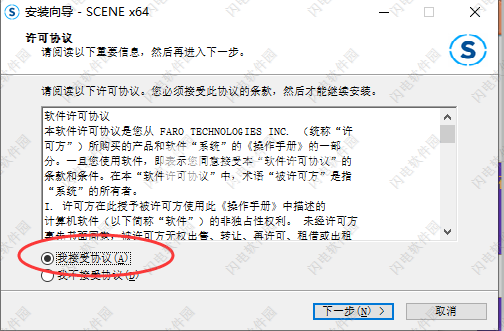
2、双击E1794_SCENE_7.1.1.81_x64_Setup.exe运行,勾选我接受协议,点击next
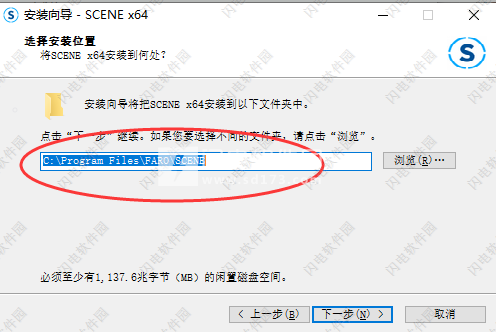
3、选择软件安装路径,点击next
4、安装完成,退出向导
5、将crack中的破解文件复制到安装目录中,点击替换目标中的文件
使用教程
使用扫描项目,工作区和扫描
本章介绍如何使用扫描项目,工作空间,扫描和扫描点云。 如何创建项目点云以及如何使用项目点云以及如何使用SCENE WebShare Cloud数据将在后面描述,因为这些数据通常是在项目工作的最后阶段创建的。、
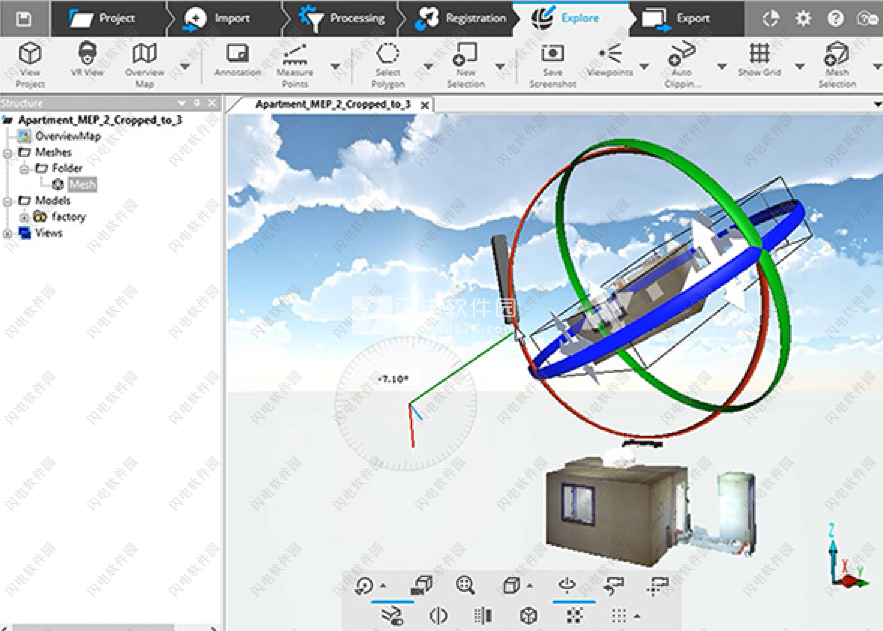
1、SCENE窗口的组成
1、SCENE窗口的组成
新创建的扫描项目最初是空的,必须用扫描填充。
打开扫描项目后,将显示典型的SCENE窗口。
该窗口由以下区域组成:
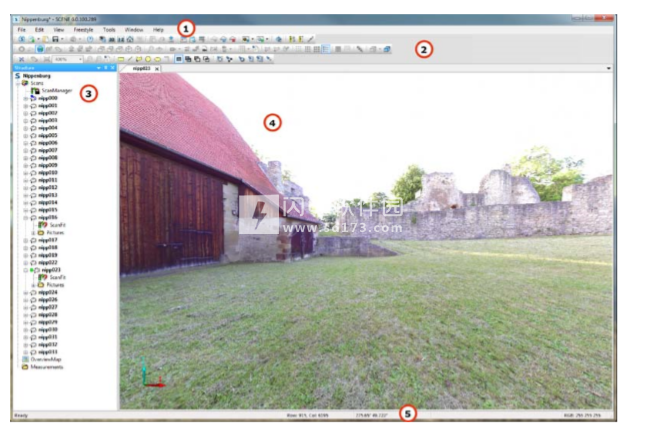
①菜单栏 - 包含所有带有一般操作命令的菜单。
2)工具栏 - 提供使用鼠标访问常用菜单功能的快捷方式。
Switch用户界面按钮切换到新的SCENE 6用户界面。 该接口目前不提供全部功能,但对于常见应用程序来说已经足够了。
如果打开了扫描项目,则可以从最近的SCENE 5.5类型用户界面切换。如果打开了本地工作区,则无法切换到SCENE 6用户界面。
③结构视图 - 显示工作区的结构,包括所有子文件夹和对象。 “结构视图”窗口右上角的小箭头按钮打开一个菜单,该菜单提供了多个显示选项。 单击“扫描视图”窗口后,结构视图是保持可见还是自动折叠,可以通过针脚按钮进行控制。
④扫描和对象视图 - 扫描数据和其他对象的可视化表示。扫描和对象可以显示在快速视图,详细的平面视图或3D视图中。
⑤状态栏显示命令和扫描点数据详细信息,工具提示以及对最后执行的命令的响应。
可以显示扫描和对象视图
·作为选项卡
·或作为未固定的窗户。
选项卡式窗口是标准显示选项,允许您通过单击窗口的选项卡在多个窗口之间进行操作。这是为了在屏幕上释放更多空间。您可以在“查看选项卡式文档”下的两个显示选项之间切换。
通过单击标题栏中的最小化图标,可以最小化显示为未锚定窗口的视图。显示为选项卡式文档的视图具有其他显示选项,可通过右键单击其选项卡或标题栏来访问这些选项。另一个显示选项是演示模式。
SCENE正在最小化所有菜单和工具栏,以便在屏幕上为扫描数据提供最大空间。此功能通过“视图”菜单或使用CTRL-F11或ALT-ENTER作为快捷方式控制来控制。
2、项目工作区
2、项目工作区
项目工作空间包含处理扫描所需的所有对象,使分析易于理解。 这通常包括:
·扫描文件的链接。
·扫描定义扫描项目结构的文件夹或群集。
他们将许多扫描组织成一个易于管理的安排。
·扫描中识别的几何对象及其拟合对象。
·参考外部坐标系。
·文档对象,提供有关扫描或点云中用户定义的兴趣点的信息。
· 测量
·用于将扫描现实与现有计划进行比较的CAD模型。
1)扫描
扫描是扫描文件,因为它们由扫描仪记录,包含数百万条数据记录,包括单个扫描点的位置,反射率和颜色。 扫描包括从单个扫描仪位置记录的扫描点。 它们按行列顺序组织。 有关使用扫描的更多信息,请参阅第40页的“保存扫描项目”一章。
2)扫描点云
扫描点云是扫描的替代表示,必须从单次扫描创建。 扫描点云以空间数据结构组织,有助于基于点可见性快速可视化扫描点和自动点加载。 它们可以促进和加速扫描点的处理。
有关使用扫描点云的更多信息,请参阅第34页的“扫描项目”一章。
3)项目点云
SCENE中扫描项目的结果通常是扫描对象的综合项目点云。
与扫描和扫描点云不同,项目点云包含扫描项目中所有扫描的点,可以看作是整个扫描项目的综合点云。 它通常是在项目经过预处理,着色和注册后从项目中的所有单次扫描创建的。
有关使用项目点云的更多信息,请参阅第225页的“使用Praject Point Cloud”一章。
4) SCENE WebShare Cloud
SCENE WebShare Clouddata是根据扫描创建的,包含可以放在Internet上的全景扫描图像,因此您可以与其他人共享扫描项目的扫描信息。
有关使用SCENE WebShare Clouddata的更多信息,请参阅第23页上的“创建和加载SCEVE WebShare Cloud数据”一章
二、Workspaces
二、Workspaces
1、创建新工作区
您可以通过创建一个新的空工作区
·从“文件”菜单中选择“新建工作区”命令,或双击扫描文件(扩展名为.fls)。 然后,SCENE将打开一个仅包含此扫描的新工作区。
新工作空间最初仅存在于SCENE中,而不是文件系统中的文件,也不与扫描项目相关联。 为此,您必须明确保存工作区。
没有关联扫描项目的工作空间在保存时与扫描项目相关联。 “保存”或“另存为”对话框为没有指向现有扫描项目的链接的所有工作区提供这些选项。
创建新建 - 为此工作空间创建新的扫描项目。 系统将要求您指定此新扫描项目的名称和位置。 使用现有 - 将工作空间关联到现有扫描项目。 系统将提示您指定该扫描项目的位置。
在这两种情况下,工作空间都将被视为该扫描项目的本地工作空间,并保存到“路径和文件名”下指定的文件夹中。 最初,必须首先使用扫描或CAD模型填充新工作空间。
2、工作空间结构
工作空间中的所有对象都按层次结构排列,以便于查找。 这类似于文件系统,其中文件放在文件夹中,文件夹也可以分层嵌套。
在工作区层次结构的顶层,您可以找到以下文件夹:Documentation-包含文档对象。
参考文献 - 包含调查数据和任何自制参考点。
测量 - 包含测量日志。
模型 - 包含CAD模型。
扫描文件夹:
包含扫描。
此文件夹通常根据扫描项目的名称命名,并且可能具有多个扫描子文件夹,具体取决于扫描项目的结构。
在结构视图中,您可以看到对象的层次结构。
群集文件夹:
Scans文件夹可能包含再次包含扫描的文件夹。 这样的文件夹称为Cluster.A群集可能再次包含其他群集文件夹。
扫描:
扫描本质上也是一个文件夹,除了扫描点之外,还可以包含其他信息,如对象(但是,没有进一步的扫描)。
您可以重新排列层次结构中的对象。 要执行此操作,请选择一个对象并使用拖放操作将其移动到您需要它的文件夹中。 您可以在结构视图和平面视图中执行此操作。 如果使用鼠标左键,则对象的属性不会更改。 特别是本地坐标不会改变。 但由于坐标的层次结构,它可能已更改其全局坐标(有关坐标的详细说明,请参阅第253页的“坐标”一章)。 如果使用鼠标右键,将打开一个附加的上下文菜单,您可以使用该菜单决定对象应该发生什么。
图层:
除此层次结构外,还将对象分配给图层。 图层用于独立于层次结构对对象进行分组,并控制这些对象组的可见性。 例如,在CAD模型中,您可以将建筑物的内墙放在单独的图层上。 如果您使该图层不可见,则可以非常轻松地获得建筑物中可用楼层空间的印象。 可见性设置在第67页的“可用性设置”一章中进行了说明。
您可以为大多数对象提供自己的名称,这些名称可能只包含字母,数字和点。 和下划线'。 扫描无法重命名。 不应重命名References文件夹,因为它用于注册扫描。
3、在工作区中查找对象
3、在工作区中查找对象
SCENE提供搜索功能以搜索当前工作空间中的对象。 可以在“工具查找和定位对象”下的菜单栏中找到此搜索。将打开一个对话框,您可以在其中输入要搜索的对象的名称。
如果工作空间中具有给定名称的对象,则它将在工作空间的“结构视图”中展开,并位于当前打开的活动视图中。
搜索不区分大小写并考虑子字符串(例如,如果搜索“sphere”,则还会找到名为“Sphere_123”的对象)。
如果找到多个对象,则所有对象都在工作区树中展开,并且包含边界框的位置将显示在活动视图中。
4、合并工作区
4、合并工作区
如果您正在使用本地工作区,则可能需要将其与其他工作区合并。
使用命令File,Import,selectFARO Workspaces以及文件扩展名导入其他工作区。 fws然后选择工作区文件。合并时,导入当前加载的工作空间中尚不存在的导入工作空间的所有对象。 如果对象已存在,则它将从导入的工作空间中替换为该对象。
也可以导入整个扫描项目(具有文件扩展名)
。 Isproj)或与不同扫描项目相关的本地工作空间。 在这些情况下,将如上所述导入对象,扫描和扫描点云; 项目点云在导入过程中被明确排除。
软件无法下载?不知道解压密码?微信关注订阅号"闪电下载"获取
本帖长期更新最新版 请收藏下载!版权声明:本站提的序列号、注册码、注册机、破解补丁等均来自互联网,仅供学习交流之用,请在下载后24小时内删除。

















