

Dytran是一种通用的三维显式有限元分析(FEA)软件程序,用于模拟和分析复杂的短期事件,包括结构材料的严重变形以及流体和结构的相互作用。 Dytran提供最全面,最强大的解决方案,可用于模拟冲击,挤压,渗透,爆炸和其他流体结构相互作用(FSI)应用。广泛的材料模型和元件类型使用户能够执行VPD实验和可能性分析,这些都发生在构建和测试昂贵的物理原型之前分析设计概念。Dytran用于分析固体组件,结构和流体的动态,非线性行为。它使用显式时间积分,并结合了模拟各种材料和几何非线性的特征。它特别适用于分析涉及大变形,高度非线性以及流体和结构之间相互作用的短暂瞬态动态事件。 典型应用包括气囊充气、气囊乘员互动、钣金成形分析、武器设计计算,例如自锻造碎片、鸟类对航空航天结构的影响、滑水、结构对爆炸和爆炸载荷的响应、高速穿透、船舶碰撞等各个方面,Dytran在单个包装中提供结构,物料流和耦合FSI分析功能。Dytran采用独特的耦合功能,可在一次连续模拟中对结构部件与流体和高度变形的材料进行综合分析。本次带来最新破解版,有需要的朋友不要错过了!
安装破解教程
1、在本站下载并解压,如图所示,得到以下内容

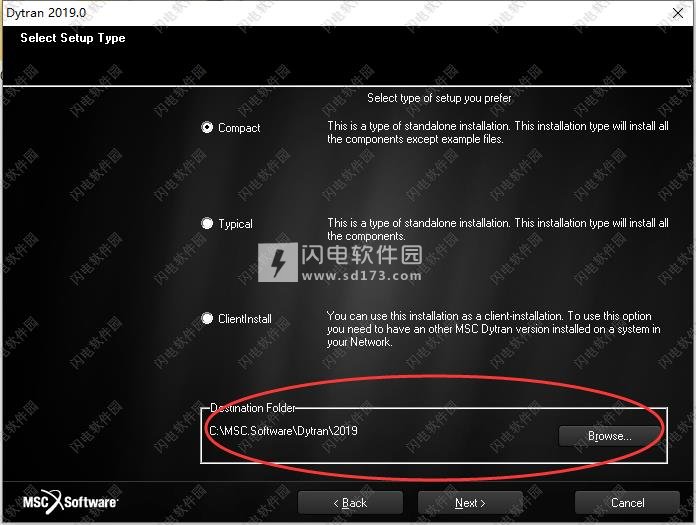
2、首先我们双击dytran_2019_windows64.exe运行安装软件,如图所示,这里选择安装类型,点击浏览选择软件安装路径,点击next
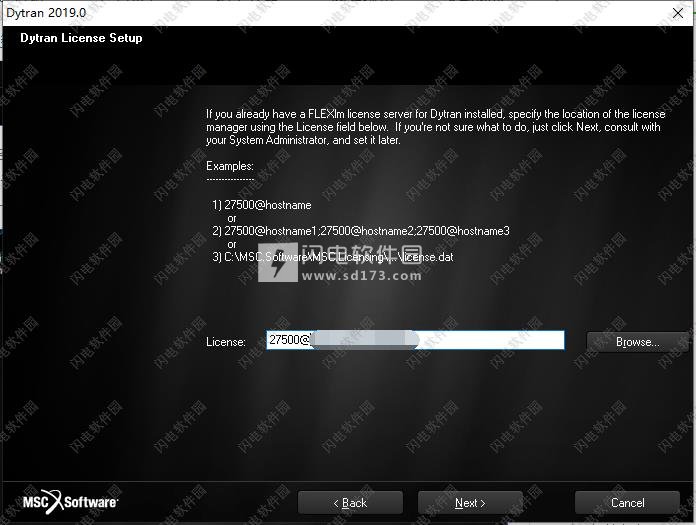
3、这里,如图所示,我们需要输入27500@yourhostname也就是27500@电脑名称
4、继续点击next,如图所示,安装中,稍等一会儿
5、安装完成,点击finish退出向导
6、以上完成后,我们来双击MSC_Calc_20190228.exe运行,如图所示,您想要当前主机的许可证吗?这里输入Y,然后点击回车

7、许可证生成后,点击任意键退出,此时在文件夹中会生成一个license.dat文件
8、然后运行msc_licensing_11.13.1_windows64.exe,勾选第一项install msc license server
9、如图所示,这里选择我们刚才生成的许可证文件license.dat,剩下的根据提示完成即可

10、运行软件享用即可

4、网格生成和操作
可以使用MESH批量数据条目创建具有等距网格的矩形网格,该网格包含与基本坐标系轴对齐的CHEXA元素。
如果要移动某些网格点,可以使用GROFS批量数据条目将偏移应用于网格点坐标。
5、元素定义
元素的拓扑结构是根据元素所连接的网格点定义的。“C”
新功能介绍
1、分子
。具有四个,六个和八个网格点的Euler实体单元具有四个,六个和八个网格点的拉格朗日实体单元aShell和具有三个和四个网格点的膜元件
。具有两个网格点的梁,弹簧和阻尼元件
。Spotweld元素失败
。安全带元件
2、物料
。一般材料模型,具有弹性性质,屈服准则,状态方程,剥落和破坏模型以及爆炸燃烧逻辑的定义
。弹性,弹塑性和正交各向异性材料的本构模型
。多层复合材料的本构模型
。钣金成型应用的本构模型
。壳体和梁的应变率相关材料模型
。泡沫,蜂窝和橡胶的本构模型刚体
3、刚性椭圆体
。外部定义的刚性椭圆体
。多面刚性表面MATRIG和RBE2-FULLRIG刚体定义
4、约束
。单点约束
。运动接头(壳/实心连接)
。局部坐标系
。刚体关节
。Drawbead模型联系
5、绑定连接
。与刚性椭球的连接
。两个表面绑在一起
。网格点和表面绑在一起
。壳体表面连接的壳边缘
6、刚性墙
。拉格朗日元素的刚性墙
。欧拉物质运输的刚性障碍
7、接触和耦合
。拉格朗日域之间的主从联系
。壳体结构的高效单面接触
。自适应接触侵蚀和失效
。任意拉格朗日-欧拉(ALE)耦合
。用于流固耦合的一般欧拉-拉格朗日耦合
。与刚性椭圆体接触
。与外部程序相结合
。嵌入接触的Drawbead模型
。安全带元件的接触算法
8、载入中
。集中的负载和时刻
。压力负荷
。强制运动
。欧拉流动边界
。身体力量
9、初始状态
。初始化任何网格点和/或元素变量
。由Nastran预先初始化初始化联系解决方案
。结构子循环一般耦合子循环
。高效,明确的瞬态
10、解
。几乎完全矢量化
。准静态解的动态松弛
。简单灵活的重启过程高级功能的外部用户子程序
。Application敏感默认设置
11、预处理和后处理
。Nastran风格输入
。Patran的预处理和后处理
。Input兼容大多数建模软件包
。免费或固定格式输入
。I-DEAS版本6的转换器
。WaveFront Technologies的Data Visualizer阅读器
。Dytran格式的ATB输出
实体,板和梁元件可以通过连接到公共网格点而连接在一起。该连接用作铰链,其中三个DOF元件(固体)连接到六个DOF元件
(板/束)。如果需要连接旋转自由度,则可以使用KJOlN条目。
2、欧拉解算器
网格点的定义对于欧拉和拉格朗日求解器都是通用的。网格点是模型几何的基本定义。网格点的空间坐标在GRID批量数据条目上定义。
虽然拉格朗日网格点最多可以有六个位移分量,但用于定义欧拉元素的网格点具有零或三个自由度。这些网格点是用于定义欧拉网格的空间位置的几何设备。
拉格朗日和欧拉元素不能有共同的网格点。如果要连接拉格朗日元素和欧拉元素,则必须为两个元素类型创建单独的网格点,然后使用ALE和SURFACE批量数据条目。
3、网格点排序
网格点编号的顺序对解决方案没有影响; 因此,您可以自由选择任何便于数据生成或后处理的编号系统。 允许使用网格点编号,建议您使用编号系统,以便从分配的编号中轻松识别模型中网格点的位置。软件特色
1、针对不同应用的准确,稳健的分析
通过与物理实验的相关性证明了Dytran的准确性。 Dytran帮助工程师预测原型如何响应各种现实世界的动态事件,并检查产品失效的潜在原因。一些例子包括:
·航空航天应用:飞机开沟,油箱晃动和破裂,鸟击模拟,发动机叶片遏制,飞机耐撞性,座椅设计和安全,飞机和货物围护硬化。
·汽车应用:安全气囊设计和乘员安全(不在位置研究),假人造型和座椅设计,车辆碰撞和碰撞测试,轮胎打滑,油箱晃动和破裂。
·军事和国防应用:异型充电模拟和武器设计,射弹穿透和目标穿孔,水动力冲击(HRAM),船舶碰撞,水下冲击爆炸(UNDEX),抗爆炸和生存能力。
·其他工业应用:瓶子和容器设计,送纸,跌落测试,运动器材影响分析,包装设计。
2、模拟技术的独特组合
Dytran在单个仿真包中提供结构,材料流和耦合FSI分析。显式非线性求解器技术用于分析极端,短时,瞬态事件,这些事件需要更精细的时间步骤来确保解决方案的准确性和稳定性。
这允许您模拟涉及(i)高度材料非线性的FEA问题,
(i)大的几何非线性,和(fi)极端边界非线性。
Dytran利用拉格朗日求解器以高精度监测结构中的位移和应力。复杂的材料流动采用先进的多材料欧拉求解器技术建模,对模拟材料的变形量没有限制。拉格朗日之间的相互作用Eulerian有限元网格是通过Dytran独特的直接耦合特征实现的,可以在一个连续模拟中对流体和高度可变形材料的结构组件进行综合分析,从而快速,轻松地为您提供预测结果。
Dytran创建的能够在耦合曲面移动和变形时模拟自适应多个欧拉域的交互,使您能够分析复杂的FSI场景,这些场景通常太难或无法用其他软件工具模拟,例如:
·影响多层结构的多个物体(例如,确定在飞行中多次鸟撞击飞机结构的影响)。
软件功能
1、先进的显式非线性求解器技术,用于模拟和分析极端,短时动态事件,例如各种工业和商业应用中的材料的碰撞,挤压,冲击,跌落,冲击,摇晃,爆炸,穿透和晃动。
2、使用拉格朗日有限元法进行结构分析的鲁棒有效的三维接触和耦合算法以及用于流体和多材料流动分析的欧拉有限体积法。
3、完整的有限元模型库,包括梁,壳,固体,弹簧和具有大排量配方的阻尼器。
4、适用于金属,复合材料,土壤,泡沫橡胶,液体和气体的全系列非线性材料模型。
5、分布式内存并行(DMP)支持欧拉解算器和耦合表面计算
6、通过Dytran的简化建模流程和最先进的流体 - 结构交互(FSI)仿真功能,最大限度地降低物理原型设计的成本并消除冗余测试周期。
7、快速获得对其他仿真工具无法轻易解决的现实问题的非线性动态行为的详细了解。
8、模拟复杂场景并执行“假设”
在单个分析包和模拟环境中,在设计周期的早期进行分析。
9、应用Dytran的结果来提高产品质量,并将失败的可能性和重新设计成本降至最低。
使用帮助
1、拉格朗日求解器
网格点是模型几何的基本定义。网格点的空间坐标在GRID批量数据条目上定义。每个网格点最多可以有六个位移分量或自由度,具体取决于网格点所连接的元素。这些自由度是基本坐标系中的三个平移分量和三个旋转分量。可以使用GRIDentry上的字段或使用其中一个SPCn条目将永久单点约束应用于拉格朗日网格点。可以在三个平移分量(1,2,3)和三个旋转分量(4,5,6)的任何组合中约束网格点。实体,板和梁元件可以通过连接到公共网格点而连接在一起。该连接用作铰链,其中三个DOF元件(固体)连接到六个DOF元件
(板/束)。如果需要连接旋转自由度,则可以使用KJOlN条目。
2、欧拉解算器
网格点的定义对于欧拉和拉格朗日求解器都是通用的。网格点是模型几何的基本定义。网格点的空间坐标在GRID批量数据条目上定义。
虽然拉格朗日网格点最多可以有六个位移分量,但用于定义欧拉元素的网格点具有零或三个自由度。这些网格点是用于定义欧拉网格的空间位置的几何设备。
拉格朗日和欧拉元素不能有共同的网格点。如果要连接拉格朗日元素和欧拉元素,则必须为两个元素类型创建单独的网格点,然后使用ALE和SURFACE批量数据条目。
3、网格点排序
4、网格生成和操作
可以使用MESH批量数据条目创建具有等距网格的矩形网格,该网格包含与基本坐标系轴对齐的CHEXA元素。
如果要移动某些网格点,可以使用GROFS批量数据条目将偏移应用于网格点坐标。
5、元素定义
前缀为元素名称(例如CHEXA或CQUAD4)标识这些连接条目。此连接条目中网格点的顺序很重要,因为它定义了元素内的局部坐标系,因此定义了壳和膜元素的顶部和底部表面的位置。
连接条目引用属性定义条目,该条目可以定义元素的一些其他几何属性,例如厚度。以元素类型为前缀的“P”(例如,PSO1D,PSHELL)标识这些条目。属性条目还引用了材料条目。
材料条目用于定义模型中使用的材料的属性。材料模型在Dytran理论手册第3章:材料中有详细介绍。
这些元素都可以在良好的建模实践的范围内相互使用。当在模型中使用实体和壳元素时需要小心,因为实体元素仅具有平移自由度,而壳具有平移和旋转自由度。
Dytran中的所有拉格朗日元素的公式都很简单;实体和壳单元分别基于三线性和双线性位移插值。元素集成在元素质心的单个点上。
抛物线和其他高阶元素不可用于确保解决方案中的最高效率。 Dytran的明确表述在分析中需要许多时间步骤,可能超过100000.因此,每个步骤尽可能高效是至关重要的。已经表明,与较少数量的更复杂的元素相比,更多数量的简单元素产生更便宜的解决方案。
Nastran的用户应该注意到,尽管Dytran元素与Nastran中的元素具有相同的名称,但它们的配方和行为却不同。
由于使用简单,恒定的力或力矩元素,因此显性模型倾向于在高可塑性或内部接触的区域中具有精细网格。
MSC DYTRAN 2019
软件无法下载?不知道解压密码?微信关注订阅号"闪电下载"获取
本帖长期更新最新版 请收藏下载!版权声明:本站提的序列号、注册码、注册机、破解补丁等均来自互联网,仅供学习交流之用,请在下载后24小时内删除。


















