

软件标签:Pix4Dmapper Pro
Pix4Dmapperpro破解版是一款专业的用于无人机自动航测功能的三维建模软件。是用于专业无人机测绘的领先摄影测量软件。这款专业的基于无人机的测绘软件是纯粹基于影像的陈旭,可帮助用户全自动转换影响,它的目的是将从无人机,手持设备或飞机拍摄的影像,快速便捷的生成高精度,带地理坐标的的二维地图和三维模型。并且生成的结果是可定制的,非常适合航测制图、灾害应急、安全执法、农林监测、水利防汛、电力巡线、海洋环境、高校科研等各大领域。是无人机映射专业人员的工作流程,使用软件生成的结果具有极高的准确性和完整性,支持使用机器学习的自动点云分类,自动点云分类。使用Pix4Dmapper摄影测量软件编辑结果以便于计算,拥有平整和平滑数字表面,使用Pix4Dmapper测量3D模型中的数字表面以及轻松测量表面,距离,体积和高度和使用云检查,注释和分享3D结果。便捷的检查和注释操作,可使用Pix4D Cloud进行安全协作和共享,本次小编带来最新破解版,含破解文件,亲测可完美破解激活软件!
安装破解教程
1、在本站下载并解压,如图所示,得到以下内容
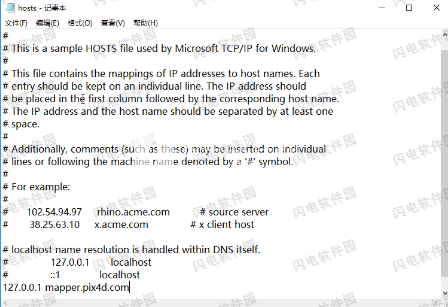
2、在安装之前我们需要组织程序链接网络,可以使防火墙,或者是找到C:\Windows\System32\drivers\etc中的hosts文件,直接把Hosts文件复制到桌面并用记事本方式打开,然后添加以下内容并重启电脑即可
127.0.0.1 mapper.pix4d.com
3、双击Pix4Dmapper2.0.104.msi运行安装软件,勾选我接受许可证协议中的调控,点击next
4、选择软件安装路径,点击next
5、软件安装完成,如图所示,去勾选运行选项,点击finish退出向导
6、运行破解文件夹中的02.exe注册机,注意以管理员身份运行,如图所示,点击激活,大家可以修改任意用户名
7、激活完成
vip资源7、激活完成
软件特色
1、三维点云
比激光扫描点更密集,从重叠图像导出的三维点云可以给出重建对象的精确位置。
2、数字表面模型&数字地形模型
数字模型为您提供每个像素的高程值,不管是否具有地面物体,为您接下来的GIS工作流程做准备。
3、正射影像镶嵌图
生成高分辨率地图,其原始图像的每个像素被正确地投影到数字表面模型上,具有精确的地理定位,不会造成透视变形。
4、体积计算
输出的体积计算量完全代表您的堆场,具有完全可调的基准面高度,从而进行精确的测量。
5、等高线
生成地形的简化表示,封闭的轮廓线表示高程。
6、三维纹理模型
全三维三角纹理与逼真的质感,方便您完美地进行共享和可视化。
7、热成像
生成精确的热成像地图,使得每一个像素都具有温度值。
软件优势
一、输入
航空彩像(垂直和倾斜)和地面影像
视频(mp4或avi格式)
任意相机彩像(袖珍,单反,热成像,多光谱,鱼眼镜头,360度全景相机,大像幅等),jpg 或tff格式
采用多个相机拍摄的图像
支持RTK/PPK+IMU数据支持相机组
控制点编辑或导入
已知或自定义坐标系,支持米和英尺单位
支持相机位置和外方位角元素
外部点云导入
二、处理
处理模板
带有质量报告的快速检查
相机自检校
卷帘快门效应校正
自动空三和光束法区域网平差
自动点云加密
自动点云滤波和平滑
机器学习点云分类
自动生成DTM/DEM
自动亮度和颜色校正
质量报告
项目合并和拆分
项目处理区域定义
自定义特征点数量
支持CPU+GPU多处理器
辐射校准
三、空三射线编辑器
三维可视化
浏览模式
比例约束
方向约束
控制点/手动连接点编辑
椭球误差可视化
项目重新优化
图像掩模
点云编辑
创建任意正射面
创建折线和平面对象
三维纹理和DSM编辑
自动检测刺点粗差
飞行动画
四、体积管理
体积对象创建
体积对象管理
基准面调整
五、镶嵌图编辑器
区域编辑
混合
透视或正射投影选择
六、指数计算器
反射图
辐射校正养面
多区管理
NDVI地图
指数公式编辑
指数分级管理
处方图标注
处方图导出
七、成果输出
2D输出成果
2.5D输出成果
3D输出成果
生成飞行动画和飞行轨迹优化的相机位置,外方位元素和内方位元素,未畸变彩像
八、合作
网络共享和可视化
软件功能
一、输入
处理各种影像,包括从任意角度,地面,无人机或常规航摄拍摄的彩像自动从视频中提取顿并创建项目
采用任意相机获取的影像,从小型到大型传感器,从消费级到高度专业化相机采用多个相机创建项目,一起处理数据
当有精确地理定位和姿态信息时,使用“精确地理定位和方向校准”方法,实现更快更稳健的处理
可以处理多个同步相机组成的相机组拍援的图像导入并编辑控制点,提高项目绝对精度
选择已有的EPSG坐标系统,或自定义本地坐标系利用GPS和IMU参数计算优化的相机位置和外方位角元素从不同数据源导入点云,如激光扫描LiDAR,用来生成DSM和正射彩像锻嵌图
二、处理
使用标准或定制的模板自动处理和生成结果
通过快速处理模板对数据进行现场检查
优化相机内部参数。如焦距,像主点和镜头畸变自检校校正由卷帘快门相机(如Gopro,DJl精灵等)拍援的图片变形,特别是在高速和低空飞行时,保证高精确度
无论是否有已知外方位元素(X,Y,Z,w,(p,)都可自动处理生成高密度和精细的三维点云,可以用于生成DSM和三角纹理使用预设选项来进行点云滤波和平滑
自动把可见光加密点云重组到五个类别:地面,路面,植被,楼字和构造物从DSM中去除地表物体来生成贴近地面的模型亮度,光照度变化自动补偿,影像色彩自动平衡
评估项目的精度和质量
把多个项目合并成一个项目,或把大项目拆分为较小的子项目,以便更高效地处理数据导入shp文件,或绘制特定区域,用来快速生成特定区域的成果给定特征点数量,在低画质情况下找到更多特征点以帮助模型重建,或在大像幅图像中减少特征点数量来加快处理速度
充分利用多核多线程的CPU以及GPU的计算能力来提高处理速度考虑光照和传感器的影响,校准图像反射数值
三、空三射线编辑器
评估相机位置校准、点云和纹理的质量
可以用标准,轨迹球,以及第一人视野来浏览点云和三维纹理模型通过定义一个或多个尺寸,对没有或地理定位不精确的的项目进行精确的模型比例调整通过定义一个或多个方向,对没有或地理定位不精确的的项目进行精确的模型方位调整同时使用原始图像和直观的三维信息,高精度地标注和编辑二维和三维控制点,检查点和手动连接点
对控制点或手动连接点的计算位置误差大小进行可视化评估基于控制点和手动连接点,重新优化相机位置,并/或进行影像重匹配,改善重建质量裁剪:从三维点云中删除点,根据图像内容创建过滤器掩模:在正射平面结果中去除不需要的背景
全局掩模:去除在所有图像中不需要的物体,比如遮挡了镜头的无人机的腿,三脚架等从点云中选择分类和删除点
自定义一个任意正射面,生成DSM和正射影像镶嵌图,如建筑立面,桥梁桩基等在点云上标注并量测折线和平面对象
在多个原始影像中精确调整折线的顶点
在点云上标注并创建平面,使特定区域平坦,或用来填充三维网格和DSM上的空洞
检测并显示错误标记的手动连接点或控制点,以减少人为失误
创建一个虚拟相机轨迹,实时播放动画并输出动画
四、体积管理
基于DSM标注并测量体积
导入和导出shp格式的基准面,堆场监测更容易
调整基准面,以适应不同地形,获得更精准的测量
五、镶嵌图编辑器
在正射影像镶嵌图中创建和编辑区域,从多幅影像中选择最佳内容来消除移动物体或瑕疵
仅编辑所选择的部分区域,实时混合并快速得到改进的正射影像镶嵌图
为每个创建的区域选择透视或正射投影来消除正射影像镶嵌图的瑕疵
六、指数计算器
设置分辨率,生成精确的反射地图,作为指数地图的基础
使用辐射校正板修正光照影响度,以取得更可靠和精确的反射地图
对多个区域分别进行指数的分析口生成各个波段及基于预定义公式的NDVI地图,无斋用户干预
选择波段,创建和保存模型公式,并以此来生成自定义的指数图
使用统计算法将数据分类到不同等级,来创建您自己的矢量图
通过实地调查和分析,标注处方图早导出shp格式的处方图,作为决策依据
七、成果输出
GeoTIFF 格式的正射影像镶嵌图
GeoTIFF格式的用户自定义平面的正射彩像镶嵌kml或html格式的Google瓦片
GeoTIFF 和GeoJPG格式的指数图(热力图,DVI,NDVI,SAVI等)shp 格式的处方图
·GeoTIFF 格式的DSM和DTM
·GeoTIFF格式的用户自定义平面的的DSM
·shp,dxf,pdf格式的等高线·GeoTIFF格式的DSM和DTM
·易于共享的3DPDF格式的三维纹理网格
·obj,ply,dxf和fbx格式的三维纹理网格
·osgb和slpk(Esri)格式的分块多层次(LoD)网格
·las,laz,xyz和ply格式的点云
·las和cSv格式的分类点云
·dxf,shp,dgn和kml格式的用户自定义的矢量对象
·obj和fbx格式的三维纹理网格
·las 格式的点云
·cSV,GEOjson 和shp格式的带有地理坐标的矢量对象mp4和avi格式的飞行动面,csv格式的飞行轨迹和航点输出空三成果到传统摄影测量软件系统(如INPHO,Leica LPS,DAT/EM Summit Evolution)
八、合作
用浏览器查看二维地图和三维模型
测量距离,面积和高程剖面
同时使用原始影像和三维信息来进行检测和标注
使用一个简单的链接就可以分享带有标注的项目
在网页上嵌入项目输出成果
数字表面模型(DSM)的实时可视化
使用帮助
一、 处理选项
这些是Pix4Dmapper中可用的默认处理选项模板。我们强烈建议您使用这些来处理您的项目:
3D地图
输出:3D地图(点云,3D纹理网格)以及DSM和Orthomosaic。典型输入:使用网格飞行计划获取的航拍图像。输出质量/可靠性:高。处理速度:慢。应用:采石场,护士等
3D模型
输出:3D模型(点云,3D纹理网格)。典型输入:具有高重叠的航空倾斜或地面图像。输出质量/可靠性:高。处理速度:慢。
Ag多光谱
输出:反射率,指数(如NDVI),分类和应用图。典型输入:来自多光谱相机的天线最低点图像(红杉,MicasenseRedEdge,Multispec4C等)。输出质量/可靠性:高。处理速度:慢。应用:精准农业。
Ag改良相机
输出:反射率,指数(如NDVI),分类和应用图。典型输入:来自改进RGB相机的天线最低点图像。输出质量/可靠性:高。处理速度:慢。应用:精准农业。
AgRGB
输出:orthomosaic。典型输入:用于农业的RGB相机的图像(SequoiaRGB)。输出质量/可靠性:高。处理速度:平均。应用:数字侦察,报告要求精准农业。
3D地图-快速/低分辨率
更快地处理3D地图模板,以评估采集的数据集的质量。输出质量/可靠性:低。处理速度:快。
3D模型-快速/低分辨率
更快地处理3D模型模板,以评估采集数据集的质量。输出质量/可靠性:低。处理速度:快。
Ag改良相机-快速/低分辨率
更快地处理AgModifiedCamera模板以评估所采集数据集的质量。输出质量/可靠性:低。处理速度:快。
AgRGB-快速/低分辨率
更快地处理AgRGB模板以评估所采集数据集的质量。输出质量/可靠性:低。处理速度:快。
热成像仪
输出:热反射图。典型输入:热像仪(基于Tau2:FLIRVuePro,FLIRXT)。输出质量/可靠性:高。处理速度:慢。应用:灌溉控制,太阳能电池板,建筑检查等
ThermoMAP相机
输出:热反射图。典型输入:使用thermoMAP相机拍摄的最低点图像。输出质量/可靠性:高。处理速度:慢。
二、Pix4Dmapper中的新项目
1、创建一个新项目
要创建新项目:
启动Pix4Dmapper。
在菜单栏上,单击项目>新建项目...
“新建项目”向导将打开:
在名称中:键入项目的名称。
(可选)在“创建于”中:单击“浏览”...在“选择项目位置”弹出窗口中,导航以选择将存储项目和结果的文件夹,然后单击“选择文件夹”。
警告:确保:
项目名称不使用特殊字符。
将创建项目的路径不使用特殊字符。
项目名称和路径一起包含少于128个字符。
(可选)选中“用作默认项目位置”复选框以将所有新项目保存在所选文件夹中。
在项目类型中,保持选择默认选项NewProject。
单击下一步。
2、导入图像
在“选择图像”窗口中:
单击添加图像...以添加图像。
2017-12-20_11-23-22.png
在“选择图像”弹出窗口中,导航以选择存储图像的文件夹,选择要导入的图像(可以选择多个图像),然后单击“打开”。
单击下一步。
3、配置图像属性
单击下一步之前,有3个可选步骤:
a。(可选)选择图像坐标系
如果图像地理定位是在WGS84以外的坐标系中给出的(默认),请单击坐标系下的编辑...,然后选择图像的坐标系。
b。(可选,推荐)导入图像地理位置和方向
如果图像地理位置(位置)信息存储在图像的EXIF中,则会自动加载。注意:也可以通过单击“从文件...”从文件导入地理位置信息。
注意:
软件会考虑EXIF的DateTaken字段来设置拍摄图像的顺序。
步骤1.对于具有图像地理位置的项目,初始处理更快。在没有足够重叠的情况下,图像地理定位有助于校准图像。
c。(可选)编辑选定的相机型号
需要定义相机模型才能在Pix4Dmapper中运行项目。此模型的参数取决于用于捕获图像的相机。大多数相机将其名称保存在EXIF格式的图像元数据中。此字段用于将给定的相机模型与使用此相机捕获的所有图像相关联。
“图像属性”窗口中的“选定摄像机模型”部分显示所选摄像机模型。相机型号可以是:
image6.png有效:如果相机型号有效,则会显示绿色检查。如果相机型号已存在于Pix4Dmapper的相机型号数据库中,或者如果图像的EXIF数据中有足够的信息来创建将保存到用户相机型号数据库中的新相机型号,则相机型号有效。如果从EXIF数据中检索相机型号,建议检查相机型号参数,如果需要,还可以编辑它们。
image1.png无效:如果相机型号无效,则会显示红叉。如果摄像机型号不在Pix4Dmapper的摄像机型号数据库中,并且图像的EXIF数据中没有足够的信息,则该摄像机型号无效。在这种情况下,需要手动定义相机型号。
4、选择输出/GCP坐标系
在“选择输出坐标系”窗口中:
(可选)更改输出/GCP坐标系。
注意:
默认情况下,输出和GCP坐标系统将是相同的。因此,输出可以在GCP的坐标系中显示。
默认情况下,单位为m(米)。
如果图像具有地理位置,则默认情况下会选择自动检测,显示图像的相应UTM或NAD83区域。
如果图像没有地理位置,则默认情况下会选择任意坐标系。
单击下一步。
5、选择处理选项模板
在处理选项模板窗口中:
根据应用程序和处理选项模板部分中描述的所需输出选择所需的模板。
(可选)选择“立即开始处理”框以自动开始处理。
单击“完成”以完成向导并启动项目。
三、处理步骤
1、初步处理
在此步骤中,将使用输入和输出部分中描述的图像和其他输入(如GCP)执行以下任务:
关键点提取:将特定要素标识为图像中的关键点。
关键点匹配:查找哪些图像具有相同的关键点并匹配它们。
相机型号优化:校准相机的内部(焦距,...)和外部参数(方向,...)。
地理定位GPS/GCP:如果提供了地理定位信息,请找到模型。
在此步骤中创建自动连接点。这些是后续处理步骤的基础。
有关输出的更多信息,请参见输入和输出部分。
2、点云和网格
此步骤将建立在自动连接点上:
点密度:根据自动连接点创建额外的连接点,从而产生密集点云。
3D纹理网格:基于“密集点云”,可以创建3D纹理网格。
3、DSM,orthomosaic和index
此步骤可以创建:
数字表面模型(DSM):创建DSM将能够计算体积,正射和反射贴图。
Orthomosaic:Orthomosaic的创建基于正射校正。此方法消除了图像的透视失真。
反射贴图:目标是生成一个贴图,其中每个像素的值忠实地指示对象的反射率。
索引图:生成索引图,其中使用组合反射贴图的不同波段的公式计算每个像素的颜色。
软件无法下载?不知道解压密码?微信关注订阅号"闪电下载"获取
本帖长期更新最新版 请收藏下载!版权声明:本站提的序列号、注册码、注册机、破解补丁等均来自互联网,仅供学习交流之用,请在下载后24小时内删除。

















