


功能介绍
3D跟踪在CG特效的制作流程中起着非常关键性的作用,是不可或缺的一个环节,是一个无形的CG技术。简单说它是把我们三维动画或者物体与实际拍摄时的场景相机位置、焦距、运动轨迹等保持一致的实现过程。它不仅仅应用与电影大片的制作,我们平时看到的很多游戏,建筑漫游以及广告片当中都有广泛的应用。那么在这个过程中跟踪软件就必然起到了很大的作用。
作者Yvan Galtié
提起3D跟踪软件最著名的要数Boujou了。我最开始接触时记得是1.0版本的。不过好多年没有接触,现在已经忘记差不多了。除了Boujou,主流的还有PFTrack、 Mocha、Matchmover、Syntheyes、 3D-Equalizer、Nuke也有自带的跟踪功能。

今天,我们主要说的PFTrack这款跟踪软件。PFTrack是 Pixel Farm 研究开发的一款成象物体跟踪软件,它是利用摄像机反求,使其得到真实摄像机的参数,能使3D物体和实际拍摄物体完美的结合在一起。

从2011年以来,他的更新都很小。但是,近日它的开发商Pixefarm发布了一个最新版本2017,更新了大部分的功能。具体都有哪些呢?今天,我们就数落下这个软件的更新功能。看看几个官方的功能展示视频。

有更多种方式创建和操控深度图:
◆更新了Z-Depth Solver节点
◆Z-Depth Tracker、Merge、Edit、Filter、Composite和Cache节点
◆基于Rotoscope的深度编辑等等
扩展的立体相机和图像流程:
◆在追踪到左眼信息后会自动定位右眼位置然后建立立体相机(Stereo Camera)
◆解决常见的问题,如立体梯形对齐和左眼/右眼的颜色与焦点不匹配等问题
◆使用单片Z-Depth数据渲染左右眼图像。
更新了用户界面
◆节点创建面板都利利索索的按分类分组了。
◆可以自定义节点组,把你经常用的节点可以根据自己的需要放在一个组里。
◆还有树形布局和预设XML文件等等。
支持数字电影摄像机
◆可以读取ARRI RAW媒体文件
◆从RED和ARRI源文件中自动读取相机和镜头元数据。
◆也可以从DRX,OpenEXR或者Quicktime ProRes文件中读取ARRI元数据
◆所有元数据可以通过Python或者Export节点访问。

先进的摄影测量纹理提取工具
◆在Photo Mesh节点里可以自动的创建一个优化好的纹理贴图
◆可以自动的纠正源媒体中的曝光和亮度差异提供良好的质量纹理贴图。
◆在简化时可以生成法线,置换和闭合贴图,确保简化网格物体仍能尽可能保持视觉保真度。
◆通过Export节点可以自动导出纹理贴图等等。

为深度传感器作的实验性RGBD流程
◆Auto Track 和User Track nodes可以为跟踪者在每一帧读取Z-depth值。
◆Camera Solver使用跟踪的Z-depth值帮助解决相机运动
◆在复杂的相机运动跟踪中提高精确度。
◆不用任何其他步骤可以提供真实世界的比例。
◆可以使用IPad和Occipital的Structure Sensor(一款便携式3D扫描仪)捕捉设备记录深度数据等等。
PFTrack2017安装破解教程:
1、运行安装程序“pftrack-2017.1.1.x64.msi”,不支持32位操作系统。
2、勾选图中项,允许用户协议
3、安装目录建议默认
4、点击“Install”开始安装
5、安装完成后,复制破解文件“PFTrack.exe”至安装目录下覆盖源文件,默认目录为C:\Program Files\The Pixel Farm\PFTrack 2017.1

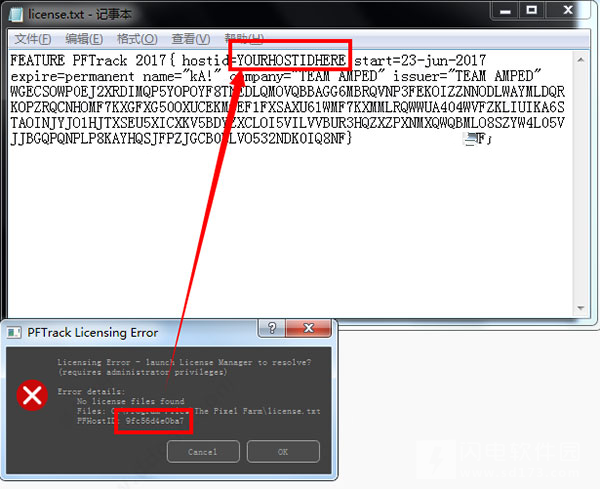
6、运行“PFTrack.exe”启动程序,弹出许可错误无需理会,打开安装包下的文件“License.txt”,将许可错误中的“PFHostID”输入至记事本中并保存
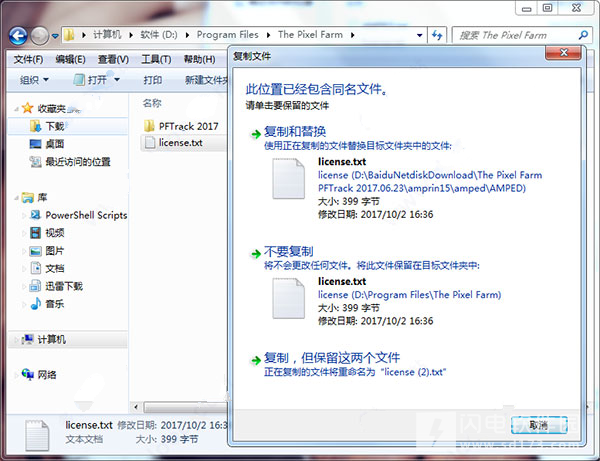
7、将修改完成后的“License.txt”复制到C:\Program Files\The Pixel Farm目录下即可
功能特点
有更多种方式创建和操控深度图:
◆更新了Z-Depth Solver节点
◆Z-Depth Tracker、Merge、Edit、Filter、Composite和Cache节点
◆基于Rotoscope的深度编辑等等
扩展的立体相机和图像流程:
◆在追踪到左眼信息后会自动定位右眼位置然后建立立体相机(Stereo Camera)
◆解决常见的问题,如立体梯形对齐和左眼/右眼的颜色与焦点不匹配等问题
◆使用单片Z-Depth数据渲染左右眼图像。
更新了用户界面
◆节点创建面板都利利索索的按分类分组了。
◆可以自定义节点组,把你经常用的节点可以根据自己的需要放在一个组里。
◆还有树形布局和预设XML文件等等。
支持数字电影摄像机
◆可以读取ARRI RAW媒体文件
◆从RED和ARRI源文件中自动读取相机和镜头元数据。
◆也可以从DRX,OpenEXR或者Quicktime ProRes文件中读取ARRI元数据
◆所有元数据可以通过Python或者Export节点访问。
先进的摄影测量纹理提取工具
◆在Photo Mesh节点里可以自动的创建一个优化好的纹理贴图
◆可以自动的纠正源媒体中的曝光和亮度差异提供良好的质量纹理贴图。
◆在简化时可以生成法线,置换和闭合贴图,确保简化网格物体仍能尽可能保持视觉保真度。
◆通过Export节点可以自动导出纹理贴图等等。
为深度传感器作的实验性RGBD流程
◆Auto Track 和User Track nodes可以为跟踪者在每一帧读取Z-depth值。
◆Camera Solver使用跟踪的Z-depth值帮助解决相机运动
◆在复杂的相机运动跟踪中提高精确度。
◆不用任何其他步骤可以提供真实世界的比例。
◆可以使用IPad和Occipital的Structure Sensor(一款便携式3D扫描仪)捕捉设备记录深度数据等等。
PFTrack 2017新功能:
1、更多的操纵深度图的方法·更新Z-Depth求解器节点
·Z深度跟踪,合并,编辑,过滤,复合和缓存节点
·Z-Depth对象节点
·基于Rotoscope的深度编辑
·准备用于基于z的合成的剪辑的理想工具
2、扩展立体摄像机和图像管道
·构建立体摄像机节点以在跟踪左眼之后自动定位右眼相机
·立体视差求解器,视差调整和视差到深度转换节点
·修复常见问题,如立体梯形校正和左/右眼颜色和聚焦不匹配
·使用Z-Depth数据从单个剪辑渲染左眼图像和右眼图像
3、改进用户界面和生产力
·节点创建面板已更新为节点组织成组,以使它们更容易找到
·新建自定义节点组,其中可以放置常用节点以便快速访问
·树布局可以保存为XML预设文件,以帮助快速构建常见的节点集
·树预设XML文件可以复制到其他机器或给予用户以共享公共布局
4、支持数字电影摄像机
·可以读取ARRI RAW媒体文件
·从RED和ARRI源文件中自动读取相机和镜头元数据。
·也可以从DRX,OpenEXR或者Quicktime ProRes文件中读取ARRI元数据
·所有元数据可以通过Python或者Export节点访问。先进的摄影测量纹理提取工具
·在Photo Mesh节点里可以自动的创建一个优化好的纹理贴图
·可以自动的纠正源媒体中的曝光和亮度差异提供良好的质量纹理贴图。
·在简化时可以生成法线,置换和闭合贴图,确保简化网格物体仍能尽可能保持视觉保真度。
·通过Export节点可以自动导出纹理贴图等等。 为深度传感器作的实验性RGBD流程
·Auto Track 和User Track nodes可以为跟踪者在每一帧读取Z-depth值。
·Camera Solver使用跟踪的Z-depth值帮助解决相机运动
·在复杂的相机运动跟踪中提高精确度。
·不用任何其他步骤可以提供真实世界的比例。
·可以使用IPad和Occipital的Structure Sensor(一款便携式3D扫描仪)捕捉设备记录深度数据等等。
使用帮助
1.打开软件,这是软件的欢迎界面。

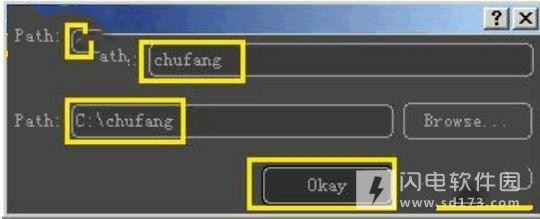
2.点击文件》新建项目来创建一个项目。
3.在项目对话框的“项目名称”栏输入“chufang”指定“路径”为C:\chufang,然后点击OKay按钮确定。
4.点击工具栏上的“载入序列文件”按钮。

5.从“载入序列文件”面板中选择已经采集的一个文件:chufang.avi
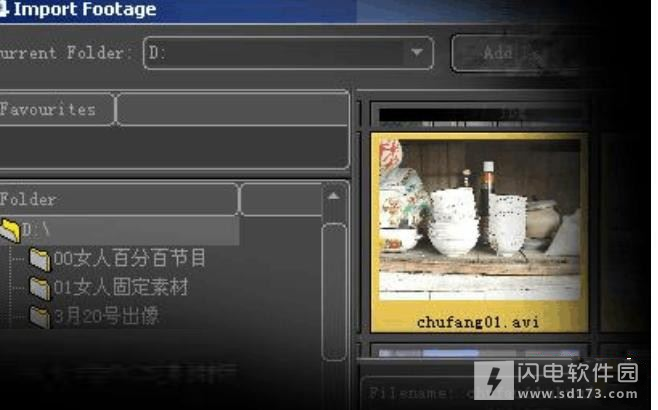
6.点击“载入序列文件”面板右下角的“载入”按钮。

7.视频文件显示在场景中。
8.点击工具栏上的“自动跟踪”按钮。
9.跟踪过程开始,显示出跟踪状态面板,场景中也出现了一些跟踪点。
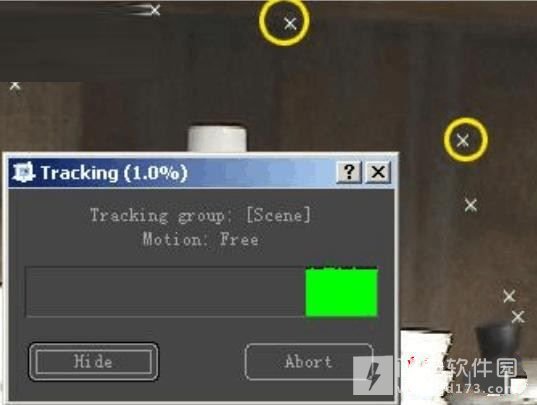
10.跟踪进行中...

11.软件开始反向跟踪,不知这个步骤的作用是什么?
12.跟踪完毕,求解摄像机的按钮变为可用,点击这个按钮。
13.在弹出的求解场景的对话框中点击“开始”按钮,进行摄像机的求解。

14.摄像机求解过程开始。
15.摄像机求解完毕,视频图像上出现了一些绿色和红色的小圆点。
16.在屏幕左边的“摄像机输出”上右击鼠标,在弹出的下拉菜单中选择“新建”
17.在场景输出对话框中设置:输出格式为.ms(max的脚本程序格式);输出路径和名称(chufang.ms),最后点击Okey输出场景。
18.屏幕左边的摄像机输出项目下,会出现一个输出的脚本文件提示。
19.关闭PFTrack,打开3ds max,点击脚本菜单下的运行脚本项,选择刚才保存的chufang.ms文件并选择打开
20.场景中自动创建了一个摄像机,跟踪点也被导入。由于摄像机默认处于选择状态,所以在时间线上可以看到密密麻麻的关键帧。
21.载入厨房.avi作为场景的背景。
22.将场景中的摄像机和所有的跟踪点群组起来,并通过移动、旋转等操作,使摄像机的网格和场景背景网格对齐。注意最下面一些点是在水平线上。
23.在场景中加入几个物体来进行测试。
24.制作一个动画预览来观看效果。
结果显示,跟踪效果良好,少数几帧有些跳动,还不知道怎么修改,因为现在还是糊里糊涂地在跟踪。
本帖长期更新最新版 请收藏下载!版权声明:本站提的序列号、注册码、注册机、破解补丁等均来自互联网,仅供学习交流之用,请在下载后24小时内删除。
















